

新闻资讯
一、行业背景
为抢占市场先机,近几年我国积极开展智能网联汽车测试示范区的建设工作,实施制造强国、网络强国和交通强国战略,以便为车联网产业提供充裕的测试环境和技术验证手段,引领国际车联网技术发展,在激烈的国际竞争环境中把握主动权。目前各地测试示范区建设已初具成效,充分利用各地地形、气候差异,实现示范区的差异化发展,但在推进示范区建设中,规模示范应用与行业服务能力建设方面存在不足,技术成果转换较慢且缺乏创新。为满足以上国家战略、经济社会效益、产业发展、居民出行的要求,满足车联网产业对基础环境标准化、行业服务能力、应用场景丰富性和运营管理能力等方面面临的关键问题,需要加 速车联网创新技术转化及先导应用部署。
在此背景下,2017年中国汽车工程学会发布了《合作式智能运输系统 车用通信系统应用层及应用数据交互标准》,定义了17个Day I应用场景,5类V2X数据集,主要针对辅助驾驶(安全警告类)。2020年中国智能交通产业联盟发布了《合作式智能运输系统 车用通信系统应用层及应用数据交互标准(第二阶段)》,定义了13个DAY II应用场景,9类V2X数据集,主要针对路侧感知(共享、引导、协作规划类)。
经统计,DAY I应用场景有13个采用V2I通信方式,DAY II应用场景中有9个采用V2I通信方式,这也从侧面印证了车路协同技术对自动驾驶的重要性。 为了能够将路侧信息精准快速地传递到车端,需要采用具备高精度、低延迟、高稳定的传感器和数据融合计算设备打造路侧感知系统。
二、现状分析
当前国内车联网先导区或示范区所采用的路侧感知系统基本均为“前端感知设备+MEC”的组网架构,前端感知设备涉及的硬件包括视频监测设备、交通监测雷达和气象监测设备。摄像头实现路口斑马线,较近距离道路行人、非机动车、机动车的识别与预警;雷达实现路口各方向路段,中远距离车辆非机动车的识别与预警;气象监测设备用于探测周围环境信息,服务于智能网联汽车对外界环境的感知。MEC用于处理前端感知设备采集的环境数据并进行结构化,形成智能网联汽车、云平台、交通发布系统等可识别的数据信息。
由于交通场景的复杂程度不同,路侧感知环境需求也不尽相同,根据前端感知设备的差异,大致可分为如下三种建设方案:
1、毫米波雷达+激光雷达+摄像机方案:可实现对交通路况的原始信息感知,进而通过边缘计算能力,对数据进行处理,形成局部感知和统计结果,支撑路侧智慧应用。存在造价高,对MEC性能要求高等劣势,一般仅局部部署。
2、毫米波雷达+摄像机方案:可实现对行人、车辆、交通事件的检测和监控,路侧设备将传感器的原始数据进行处理、融合,最终得到盲区交通目标信息,通过智能路侧终端将该信息发送至智能网联车辆,车内的智能车载设备根据实际情况给驾驶员告警。MEC需要摄像机视频图像进行目标提取,并将结构化数据投放到雷达坐标中,存在数据延迟明显、MEC功耗高等弊端,还未能成熟落地。
3、摄像机方案:可实现对行人、车辆、交通事件的检测和监控,终得到盲区交通目标信息,通过智能路侧终端将该信息发送至智能网联车辆,车内的智能车载设备根据实际情况给驾驶员告警。由于摄像机采集视频清晰度易受天气影响,无法保证全天候运行,同时MEC需要对视频图像进行目标提取,容易产生数据延迟,故该方案仅适用于环境需求不高的路段,无法广泛推广。
鉴于上述方案的局限性,为解决当前面临的问题,我司对路侧感知应用场景和数据标准深入剖析,结合国内路况特点,推出了基于融合的全息路侧感知解决方案,如下将进行详细介绍。
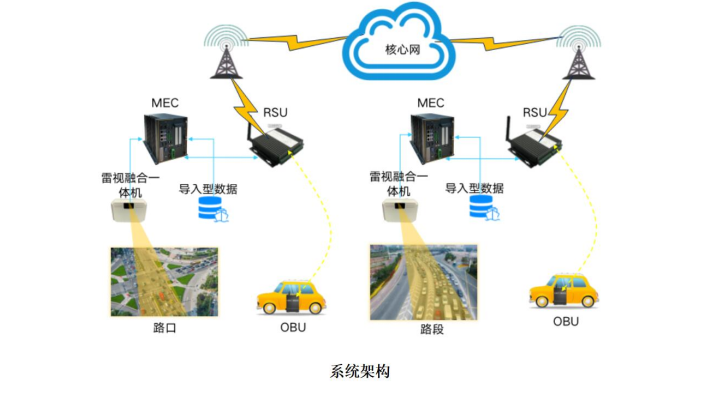
三、系统架构
基于融合的全息路侧感知系统架构遵循C-V2X的技术架构,前端感知设备采用融合一体机,即可实现对路口、路段机动车、非机动车、行人及交通事件的全天候检测和监控,融合一体机直接输出交通流矢量化数据,通过目标融合边缘服务器可对数据做深度融合,输出路侧全息感知数据,同时还可部署满足C-V2X多数路侧应用场景的算法模型,在低延迟、低功耗、低成本的前提下,实现人车路高效协同。
四、应用场景
基于融合的全息路侧感知方案可满足C-V2X行业标准中定义的绝大多数场景应用需求,显著提升自动驾驶的安全性、时效性和舒适度。例如交叉口碰撞预警、左转辅助、前方拥堵提醒等11个DAY I应用场景和协作式变道、协作式交叉口通行、特殊车辆优先等9个DAY II应用场景,均可采用融合一体机作为路侧感知设备,采集输出路侧交通流的即时数据、统计数据、事件数据,为边缘计算服务器场景应用模型提供数据支撑,辅助系统控制和高效决策。以下对常用的4个场景进行示例说明:
场景示例1:前方拥堵提醒
道路在车流量大、路段管制或交通事故等情况下容易发生拥堵,未到达的车辆往往要开到拥堵路段时才发现道路拥堵事件,从而进一步加剧道路的拥堵,如果拥堵事件发生在弯道或隧道等特殊路段,车辆还可能会因为反应不及而发生交通事故,造成更大的损失。
地址:四川省成都市锦江区汇源北路324-19号
邮箱:purchase@horizes.com